Distribuidor = Mapa de encendido
En el momento que se habla de distribuidores siempre se diferencia de los encendidos electrónicos. Lo que no se explica mucho es su gran parecido. Si te gusta preguntarte el porqué de las cosas y tienes algo de experiencia en el sector te habrás dado cuenta. Como el encargado de gestionar el avance es el mismo distribuidor, tiene que tener un mapa por algún sitio.
La respuesta es sí, pero tiene una serie de matices que quiero destacar. Este es el inicio de la eliminación de un distribuidor para hacer una electrónica 100% programable.
En primer lugar, un mapa de encendido es el encargado de que el motor responda lo mejor posible en todo su rango de trabajo (con las variables de carga y RPM)
La diferencia radica en si es un sistema electrónico, que la manera de obtener los datos del estado del motor es con sensores y centralita, mientras que, con un distribuidor tenemos todo de manera mecánica. Por eso, si entiendes un distribuidor, entenderás como funcionan los mapas y toda la electrónica que se ha ido introduciendo.
A continuación quiero explicar lo que es un distribuidor. Más adelante se regresará a los mapas.
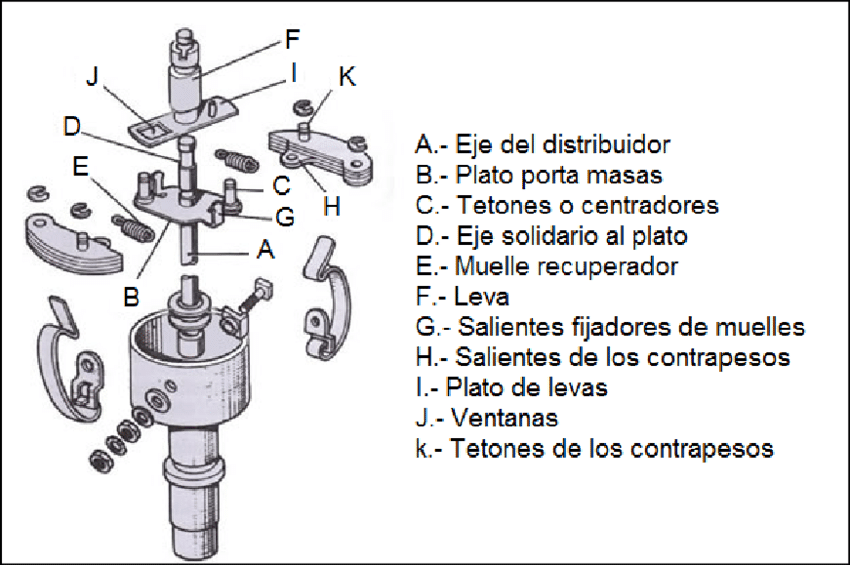
Un distribuidor tiene las siguientes partes (ver foto 1)
El eje del distribuidor (sincronizado al árbol de levas con mismas rpm)
Un rotor con 4 puntas de emisión (marcan la posición del motor dentro del distribuidor)
Un “estator” con 4 puntas que detectan las del rotor.
El dedo deriva la electricidad proveniente de la bobina al cilindro correcto.
La tapa en la que se conectan los cables de bujía y la bobina.
Pulmón de vacío conectado por un manguito al colector de admisión.
Contrapesos conectados al rotor.
Sabiendo los componentes del distribuidor se pueden explicar los tipos de avance que este regula (carga y rpm) Es aquí donde quizá podéis encontrar similitudes.
La carga del motor depende de cuanto se pise el acelerador y la resistencia a rodar que se tenga (subidas, llanos, aceleraciones, deceleraciones) Para que el motor responda bien el avance debe variar en estas situaciones. Por lo qué se gestiona con el pulmón de vacío conectado al colector de admisión y al “estator” con cuatro puntas detectoras. Esta unión permite que en función de la carga, se modifique la posición de las puntas del “estator” y el avance cambie. Por eso es muy importante este sistema y verificar que no se atasca.
El avance por RPM es gracias al uso de unos contrapesos que están conectados al rotor. Conforme el motor aumenta las revoluciones, los contrapesos tienden por su peso a abrirse. En ese momento, desplazan el rotor hacia delante avanzando el encendido.
Gracias a poder modificar la posición del rotor y “estator” (qué cada vez que se alinean las puntas se produce una chispa) se modifica el avance total mientras el motor está en funcionamiento.
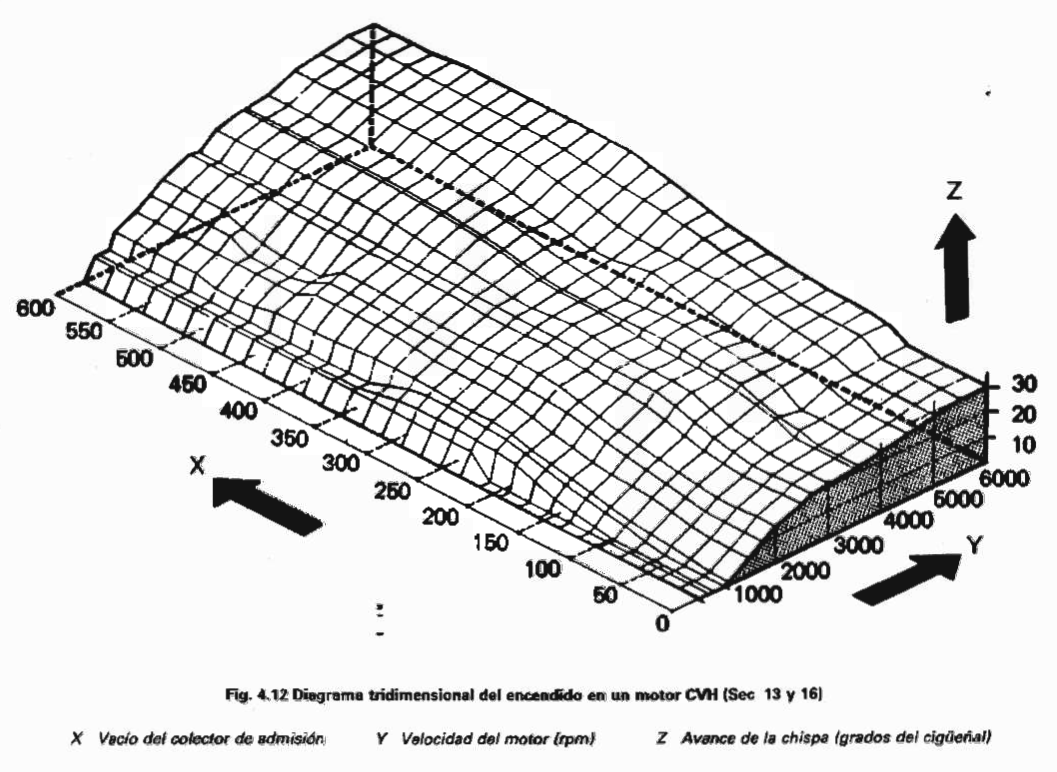
¿Por qué es el distribuidor un mapa de encendido? Porque gracias a sus componentes internos y su forma física surgen cambios en el avance. Estos cambios pueden representarse en una tabla o mapa 3D.
Anteriormente los ingenieros diseñaban el distribuidor para que cumpliese con el mapa que querían para su motor (muy diferente a lo que se hace actualmente)
Hoy en día se utilizan sensores (de posición de cigüeñal para RPM y caudalímetro para el vacío) a los que después en una tabla virtual se indica el avance de chispa. Una centralita según la información recibida decide cual es la actuación correcta.
Si bien a una centralita nosotros le decimos cuanto avance queremos en cada situación del motor (por gran cantidad de horas de ensayos) en un distribuidor habrá una gestión determinada según el peso de los contrapesos y el pulmón de vacío.
Cuando se habla de modificar el avance en un motor con distribuidor se hace referencia al estático. Esto da como resultado el aumentar o disminuir todo el mapa, es decir, si el avance en un punto es 25º Si adelantamos el estático 3º en ese punto tendremos 28º (se modifica el eje Z en la foto 2) Esto tiene la desventaja de que no podemos avanzar todo lo que queramos, solo hasta que en un punto del mapa el motor comience a picar biela. Esto limita la posibilidad de avanzar en otros lugares.
Si se quisiese modificar la gestión de carga y RPM de un distribuidor habría que alterar la masa de los contrapesos y el actuador del pulmón de vacío. Pero es muy costoso en tiempo y en estudio, por eso, lo voy a eliminar en mi motor de carreras y se va a implantar una gestión 100% programable. De esta manera podré tener el avance máximo en todo rango de carga y RPM sin reducir la vida del motor.